

And so we get to the end of the major topics I want to cover in this series on Ecological Approaches/Psychology. In the previous pieces we’ve talked about how you can understand what to do without the need for mental models to govern it, and in this article we will go a little more into depth of how feedback fits into the Perception-Action coupling. Because contrary to what you might have thought, you can control something without a mental model of what it will do.
This is Part 6 of my series on Ecological Approaches/Psychology. The article stands alone, but is part of a broader modern understanding of human action and perception.
- Part 1: Ecological Psychology
- Part 2: Motor Solutions
- Part 3: Affordances
- Part 4: Direct Perception
- Part 5: Perception-Action Coupling
- Part 6: Control Laws (you are here)
- Part 7: Implications of EA
Automotive Braking…. Again
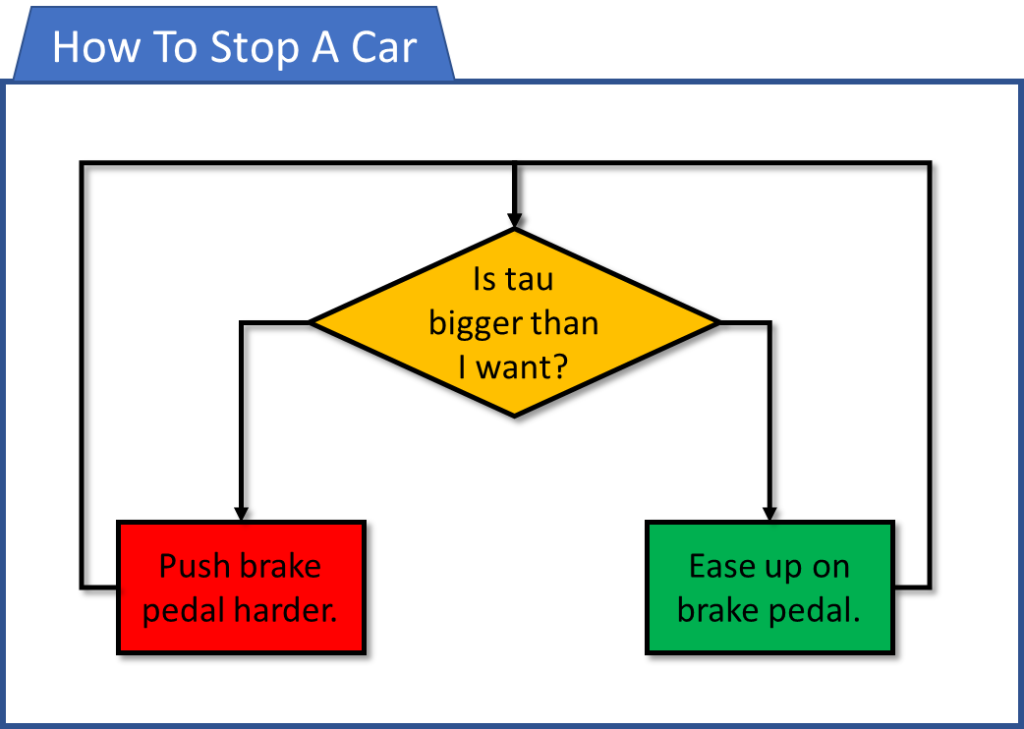
Haha, you thought I was done using car brakes as examples. This time the object of interest isn’t in how the brakes operate, but in how we control them. From Part 4 you may remember our good friend tau, the time to contact between you and an object. (We call it time to contact because you could be moving towards it, it could be moving towards you, or any combination of the two.) Tau is a property that is directly perceived by looking at something, with no calculation or mental modeling.
Knowing how long it will take to get to something, and how fast you will be going when you hit it, is more or less all you need to know to stop a car. Just make sure you constantly keep a tau between you and your stopping location equal to a tau corresponding to stopping right before it.
Unfortunately Ecological Psychology internet searches tend to kind of yield very poor results. If you had tried searching for “Tau time to contact” you might have gotten to the “Tau Effect” Wikipedia page. Which is an optical illusion involving people misjudging distances.
You may also recall in Part 5 I said that optical illusions tend to involve breaking the continuous perception-action coupling. And when you look at how to cause the tau effect: “However, if the distance from one stimulus to the next is constant, but the time elapsed from one stimulus to the next is not constant, then subjects tend to misperceive the interval that has the shorter temporal interval as also having a shorter spatial interval.” A classic case of breaking up the continuous perception-action feedback loop of the real world.
PID, Foundation of Modern Industry
The idea of using direct perception and feedback like this feels like it should be a new concept, founded in cool sounding terms like Dynamical Systems theory. But in actual fact it’s basically Controls 101 from the earliest days of engineering as a discipline.
Controlling a piece of rotating high-power machinery is not an easy task. And it was even harder in the early days of the industrial revolution when primitive steam engines tended to blow up on you. One of the most common ways to keep an engine spinning at constant speed was with a centrifugal governor, which is essentially a ball on a stick.
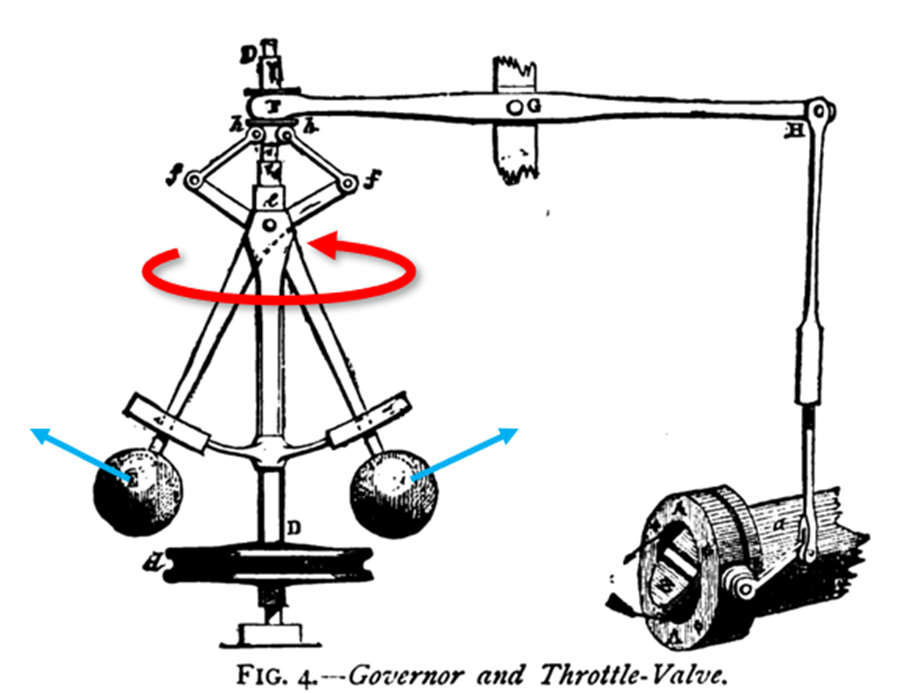
As the shaft rotates the weights are spun with it, and the faster they spin the higher they will rise. As the balls raise up they pull down on a mechanism attached to the throttle of the engine. The engine speeds up and the throttle is eased off, and if the engine slows down the throttle is increased to bring it back up to speed. This means that the engine will automatically settle itself into a predictable speed range no matter how the load applied to it changes.
The more immature amongst you may have been chuckling at some of the terminology in the last section, but it goes even further. When you fired up a machine to maximum output, the weights would be flung outwards as far as they could go, hence the origin of the term “balls to the wall”.
I bring this up to show how a sophisticated steam power machine could be controlled without any actual knowledge or model of what is going on with the load or task. All that matters is that you pick the right length and mass of the centrifugal governor and let er’ rip. And modern control theory basically makes extensive use of this type of principle for almost every damn thing this world runs on.
The centrifugal governor is a type of controller that makes use of the difference between the “ideal” and the “actual”, to get what’s known as a “position error”. It’s commonly known as a “P” type controller. To get finer control we extend this feedback relationship to include both the Integral and Derivative of the Position error to get what’s known as a PID controller, the properties of which are what I allude to in the article Control Theory. Basically any engineer is going to assume something is being controlled by some manner of PID unless they are told otherwise. (Now be good or I’ll close out this one with another extended discussion about how a PID controls the braking force applied during your car’s ABS brake events.)
People as PIDs
We can see evidence of this in human behavior as well. Here you are all safe and sound, thinking that your laser pointer strategy has succeeded in warding off buckler-based projectile attacks. When all of a sudden someone lobs a shield over a wall at you from behind a fence, safe from your laser based deterrent.
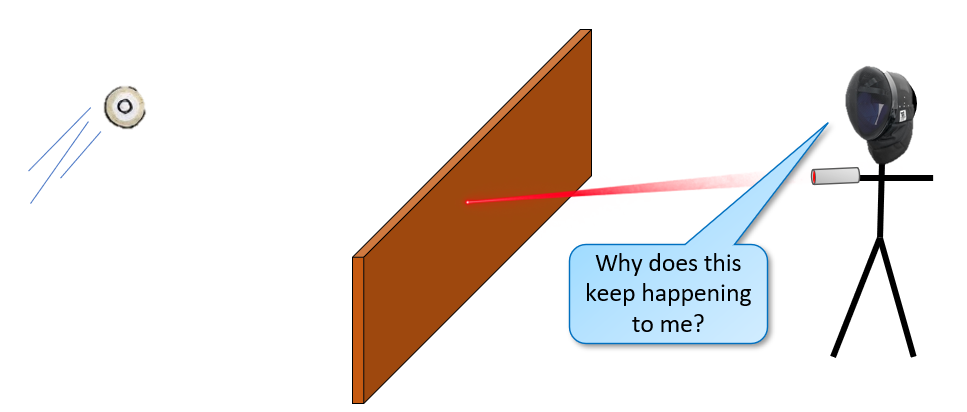
You decide to duck and cover, but which way should you run? Given they hucked a decidedly non-aerodynamic shield over a fence without even seeing you, it’s a good chance it’s going to fall short or go over your head. And if you think that the safest way to avoid the dreaded buckler-in-face would be to estimate the trajectory and landing location, you’ve learned nothing at all from these articles.
Instead we will use something simpler and less math intensive. By simply looking to see if the object appears to be accelerating upwards, or decelerating, we can know if it will land in front of or behind us.
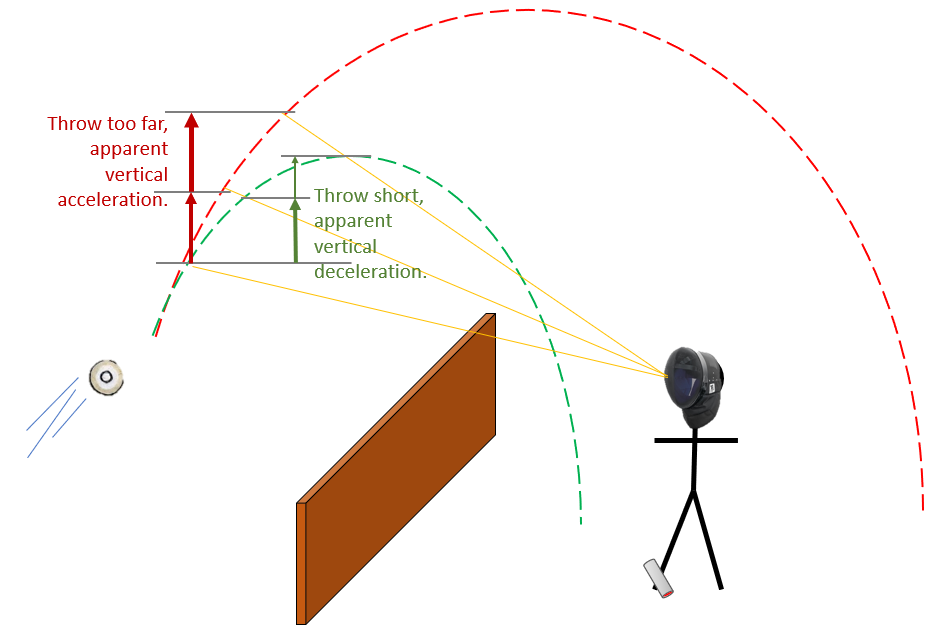
This is the strategy baseball players use to catch balls – though it’s doubtful that very many understand exactly what they are looking at. If you control your movement so that the vertical acceleration (in your field of vision) is constant, you’ll be moving right towards where the ball is going to land. It’s also why almost all animals can handle tasks like moving in relation to ballistic trajectories – because it doesn’t involve any fancy math or models.
Implications
One common element of these control schemes is that they are dependent on the rate of something happening. If you are just looking at discrete points in time the idea of rate is meaningless, as each instant stands on its own – which is how we arrive at weirdness like Zeno’s Paradoxes.
In a race, the quickest runner can never overtake the slowest, since the pursuer must first reach the point whence the pursued started, so that the slower must always hold a lead.
as recounted by Aristotle, Physics VI:9, 239b15
Control schemes require a continuous input of information, which makes it a fortuitous coincidence that I bring this topic up after introducing Part 4: Direct Perception and Part 5: Perception-Action Coupling. I would be talking about the idea of decision “points” being a flawed concept, but I already covered that in the Perception-Action Coupling section.
The Lorgnette Tachistoscope – From “The Ecological Approach to Visual Perception”
I once devised a sort of test of what perception would be like if it really consisted of a series of snapshots. I mounted the shutter of a camera on a handle so that it could be held close to one eye and triggered with a finger, giving a wide angle glimpse for a fifth of a second or less.
The other eye was covered. The subject was led up to a table on which was a collection of familiar objects and told to keep looking until he knew what was there. Because he couldn’t scan the table with his eye, he had to scan with his head and trigger the shutter for each new fixation.
Perception was seriously disturbed, and the task was extremely difficult. What took only a few seconds with normal looking required many fixations with the lorgnette tachistoscope, and there were many errors. I now begin to understand why.
– James J. Gibson
So I’ll leave with this takeaway: as a coach you have to embrace the idea that all information about the environment is being picked up. Through refinement, fighters start to attune their attention to the most important parts and have it coordinate their movements. If they aren’t used to getting the representative environmental information then they will not be able to properly calibrate their internal control laws, and the ultimate performance will suffer.
And so ends my discussion of the major scientific ideas that underpin Ecological Approaches to skill acquisition. All that’s left is to bring it all together in Part 7: Implications, where we summarize what this all suggests for coaching practice, and some of the coaching approaches that have grown out of these implications.
What Does This Mean?
I’ll wrap up each article with a more concrete example of what implications the concept has for coaching. In regards to Control Laws the most important takeaway is that there is no mental model of the fight to build. This is something we do after the fact, so we’re able to reflect back on what happened, and to communicate with others.
This means activities where you slow things down into a place where you can “think things through” are fundamentally flawed, because you are practicing a skill that is irrelevant to the actual deployment of motor control during a fencing exchange. The only way to make better choices in sparring is to create these scenarios over and over again, with clear feedback between action and result.