

In Part 2 of this series we explored motor solutions, the idea that skilled performance of a task depends on practicing a wide range of variable movements which all converge on the desired outcome, and that learning a “correct” way to do something through repetition was not an idea supported by evidence. Then we took a swerve for Part 3 and 4 to talk about perception: the concepts of Affordances and Direct Perception. Now we bring them together to discuss Perception-Action coupling, where we see how an actual task is accomplished.
This is Part 5 of my series on Ecological Approaches/Psychology. The article stands alone, but is part of a broader modern understanding of human action and perception.
- Part 1: Ecological Psychology
- Part 2: Motor Solutions
- Part 3: Affordances
- Part 4: Direct Perception
- Part 5: Perception-Action Coupling (you are here)
- Part 6: Control Laws
- Part 7: Implications of EA
Optical Illusions and Sway
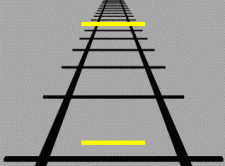
Optical illusions are often held as an example of how the body needs context clues to process the visual information it receives. This flies in the face of the Direct Perception that I have discussed previously. It is indisputable that optical illusions exist, you can see one just above this paragraph. So what gives?
The answer is in perception action coupling. You will see a similar trend in optical illusions: they are almost always two dimensional images. This is important because a 2D image has a defining feature: it will not change regardless of the angle from which you look. When examining a 3D object, a slight movement side to side provides additional information, typically enough to prevent confusion. And we are always moving.
Body Sway
Humans (or any other animal) are always in a continuous cycle of movement that affects perception, which in turn affects movement. Let’s say that you are in a crowded HEMA event and standing very still to observe the crowd for any bucklers lobbed in your direction.
However even when someone is standing “still” there is a small, almost imperceptible amount of body sway.The body will typically sway in all 4 directions equally, in a pattern that looks a little random. This would lead to the natural conclusion that is just random instability in the body, and an undesirable consequence of none of us having perfect balance. But in truth it is the opposite, a feature rather than a bug. The sway is an important part of our perception of the environment.
Let’s say you need to shine a laser pointer on a fixed target in front of you with a high degree of accuracy. You will find that the postural sway side to side decreases (and by “you will find” I mean “the high precision sensors which are monitoring you will record”). However, postural sway front to back will increase. The reverse would happen if the task involved pointing the laser to the side. The sway isn’t random. It is something the body does deliberately, and in relation to the task at hand.
Case Study: Anti-Lock Brakes
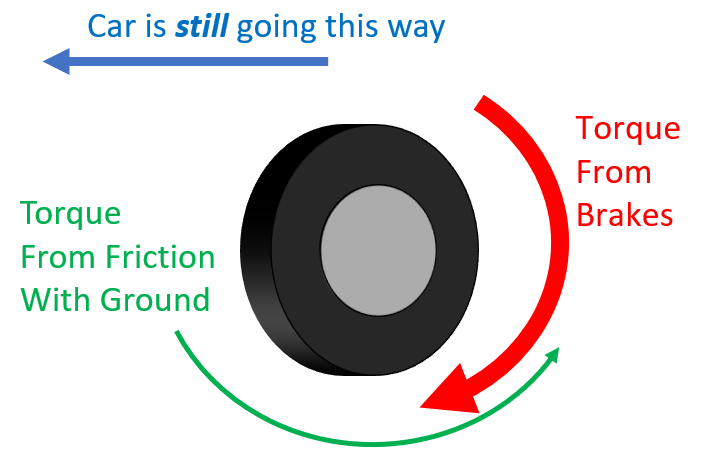
A good case study for the concept of perception action coupling is the Anti-Lock Braking system on a car (or is it that I happen to work in braking control systems and want to talk about my job?). For those of you who don’t know, ABS is the rumbling thing your car does when you step on the brakes too hard for the given road conditions.
This happens because the ground isn’t offering enough friction and the brakes are applied with so much force they stop the wheel from rotating completely. Having wheels locked up is bad (for reasons we won’t get into here) and the ABS’s job is to make sure that it doesn’t happen.
To stop as quickly as possible we want as much braking as possible, just enough to avoid getting into wheel slip. (This is known as threshold braking.) But that’s not what ABS does. It implements pressure increases and decreases in discrete pulses. If a wheel finds the sweet spot what does the control do? It applies more brakes to make the wheel start to slip a little.
This would appear to make little sense, but it actually makes the overall system much more controllable. In a way, the apply/release cycles form a feedback system where the ABS is constantly hunting for information to act upon. No-slip means no-information, so the controller is constantly trying to dip just a little bit in and out around the threshold to make sure it knows exactly what is going on. There is a constant feedback between perception (wheel speed) and action (brake applies) necessary for the efficient function of the action (stop the car as quickly as possible without locking the wheels).
Also, a fun fact: the noise and rumbling on your foot is from the pump motor circulating your brake fluid rapidly, not the wheels on the road surface.
Case Study: Zufechten
In the The Kendo Kote Dilemma, Stephen Cheney makes a point that training an action as a response to a discrete cue is a bad idea, in that stimuli are continuous and any attempt to recreate a reaction as a “good training partner” is likely not giving real learning information. This matches with what we discussed in Part 4, about how information flow is continuous and can not be boiled down into discrete cues for actions.
Now we will expand on this further by saying that your training partner’s feedback must not only be continuous to be realistic, but that it can not be isolated from what you are doing. For every action you take, your partner will be affected in some way, which then forms a loop with your behavior. These are not overt “actions” in the sense of fully formed techniques. But every shift in bodyweight you make will factor into what the opponent is doing and thus feeding back to you.
Which ultimately means that learning to watch and read your opponent has little to do with watching them, and more with understanding how they are reacting to you and what it means for the exchange to come. Because if you want to just watch what they will do I can give you a simple answer: they will walk up and hit you because you aren’t acting.
Conclusion
The big takeaway from the perception-action coupling is that the information out there doesn’t exist in a vacuum for us to interpret in isolation. We are a part of the environment and interacting with the environment is part of understanding it. A person is not an observer, they need to move to understand the situation.
The fact that there is a reciprocal relation between our actions and our opponent’s isn’t news; most fencing theory is based on it.
“Fencing is a conversation between two liars.”
– original source unknown
A much more novel concept is the idea that we need to interact with something to understand it, even if that something is an inanimate part of the environment. And while I don’t exactly consider trying to teach people how to properly sway their heads in order to gather information, it can affect how you look at designing training. Specifically that an action cannot exist outside of its environment.
A parry without an attack that is earnestly trying to hit is not a parry. The attack is what defines the parry, not the position of our own sword. If you’ve ever thought “I have trouble applying what I learned in drills into my sparring” the issue is that you learned a piece of choreography, not a piece of fencing. The motion can’t be isolated from a continuous perception-action cycle with the environment.

Now that we’ve established that there is constant feedback between perception and action, how exactly does such a thing work? If we’re not making a model to predict the future how can we control anything? Which is exactly the topic of Part 6: Control Laws. See you there!
What Does This Mean?
I’ll wrap up each article with a more concrete example of what implications the concept has for coaching. I’m going to cheat a little bit and use one that is relevant to Perception-Action Coupling, but not exclusive to it: training is all about creating direct and short feedback loops.
Having a teacher correct a student involves just about the most convoluted and long feedback loops you can have. The data is never clear, it is slow, very infrequent, and doesn’t work on the subconscious level of motor control. Instead, as a coach you should focus on creating activities where it’s intrinsically obvious if there is an issue. For instance, if a student is sweeping their sword out wide when doing a schilhau (instead of vertically) you can tell them it’s an issue over and over again. However, making them do the activity next to a wall will offer immediate and unequivocal feedback if they sweep out too wide.
Stuff For Nerds: Anti-Lock Brakes
Now that we’re at the end, I’m not done talking about ABS. The example above was longer but I trimmed it down, moved the rest here. And then made it several times longer.
Most people think that keeping the wheels from locking is about making sure you can stop in the shortest possible distance. This is somewhat true, as in just about all cases not locking up the wheels will allow the car to stop in a shorter distance. (Braking in things like gravel is an exception, as locking the wheels essentially makes them plow through and stop you even quicker.)
But the real reason we don’t want the wheels to lock is that we want to be able to control the car. Imagine you’re a patch of rubber sitting on some ice.
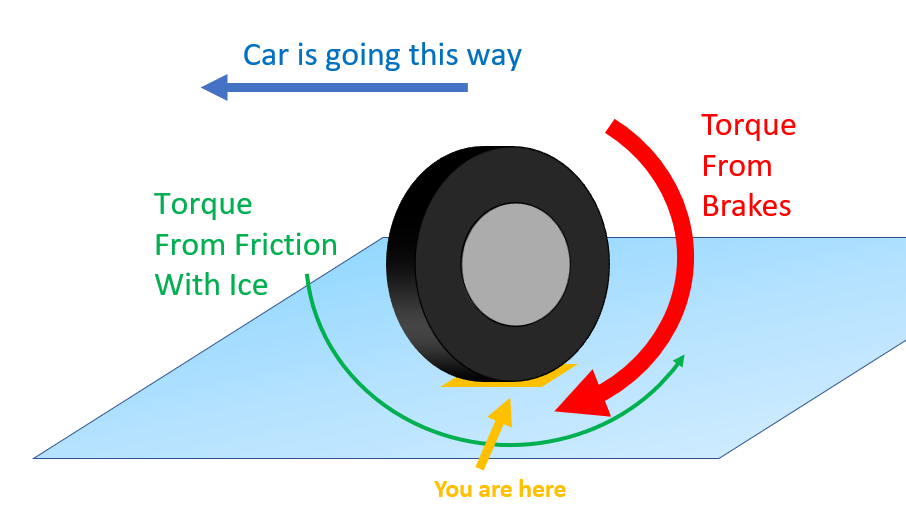
You’re technically free to move in any direction, however it’s much easier to just go in the direction the wheel is rolling. So that’s the way you go and thus the car follows where the steering wheel is pointed.
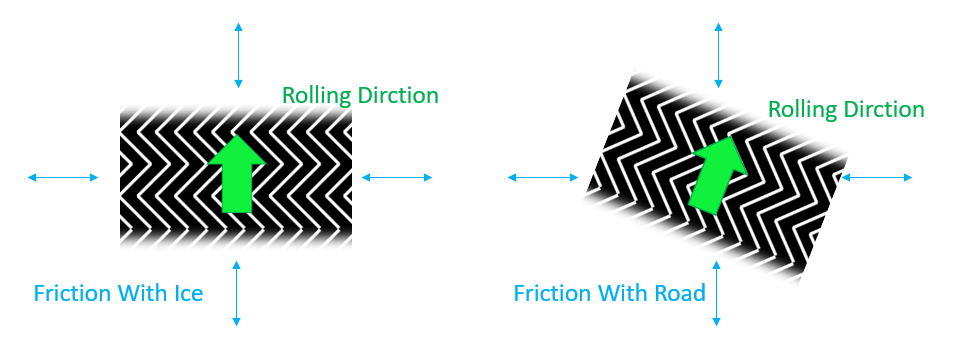
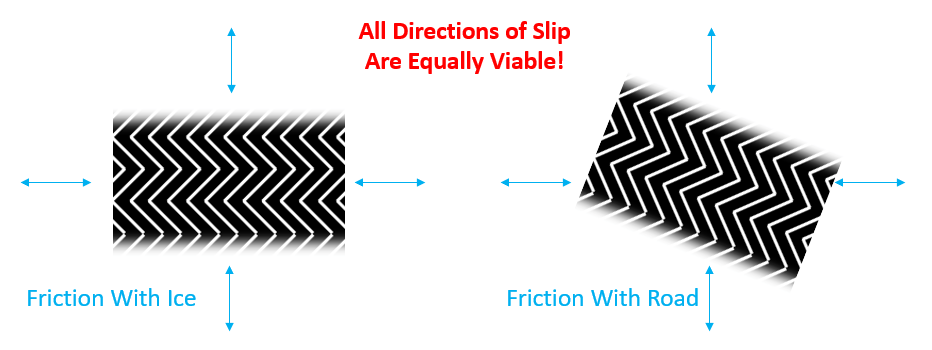
But if the wheel is not rolling, all of a sudden your little patch of rubber self has no reason to see any direction as different than the other. Sliding forward or sliding to the side are the same, and thus the driver has completely lost the ability to steer the car.
So the Anti-Lock Brakes are less about you stopping in time, and more about not having a ditch-assisted-stopping event.