

In our last installment of Why n00bs Fling the Sword (Part1) we discussed what flinging is, why n00bs fling, and why flinging is a poor tactic. In discussing these things, we had to acknowledge that in a sense, flinging is accomplishing the motor task the n00b is trying to accomplish. Namely, to move the sword point in a straight line from A to B, but doing so at maximum speed rather than maximum efficiency.
To complete this task, the n00b is trying to accomplish something that just underneath the surface is quite a challenge – achieving linear motion with an assortment of rotational axes. It’s a common enough problem that Fabrisian tradition fencing instruction spends quite a bit of time on it. So, it’s worthwhile we continue to study the problem. In my experience, it’s one of the most common mistakes to correct with a beginning student.
Motor control and motion planning are among the most difficult problems in physics. They are also among the most satisfying when they’re solved.

Motor Redundancy – how to do the same thing twice
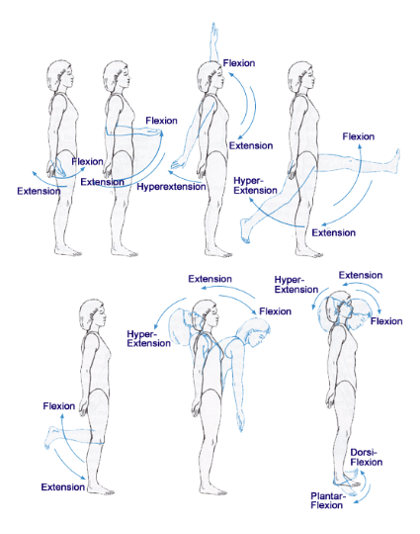
In the human shoulder joint alone there are 3 axes of rotation available – abduction/adduction, extension/flexion, and circumduction. Circumduction can facilitate pronation/supination of the hand.
Pronation and supination of the hand can also be done with just the elbow joint by rotation of the ulna and radius bones at the supinator and biceps muscles.
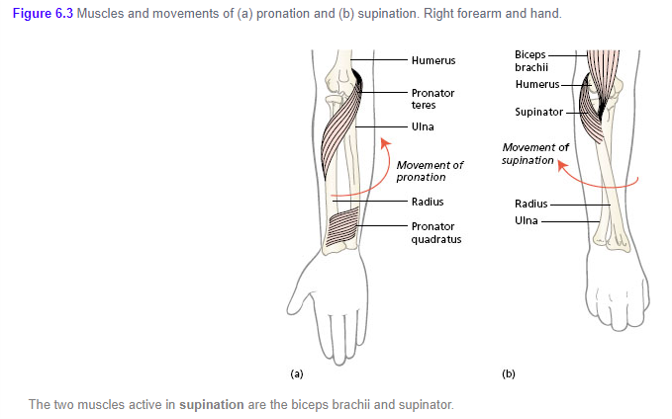
According to Essentials of Kinesiology for the Physical Therapist Assistant,
“Supination and pronation occur as the radius rotates around an axis of rotation that travels from the radial head to the ulnar head. The 0-degree or neutral position of the forearm is the thumb-up position. From this position, 85 degrees of supination and 75 degrees of pronation normally occur. People who lack full range of motion of these movements often compensate by internally or externally rotating the shoulder, so clinicians must be aware of this possible substitution when testing the range of motion of the forearm.” [3]
Clinicians who study these motions and prescribe treatments for reduced motor functionality patients must exercise care in identifying which joints are facilitating motion. If you are able, try this exercise.
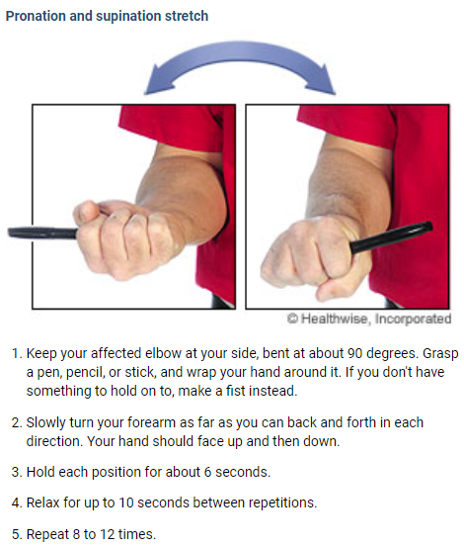
The reason the above exercise is done with the elbow bent at 90 degrees is that it makes attempted circumduction motion in the shoulder easy to detect. This allows the clinician to assess the true range of motion available to the patient in the elbow pronation and supination. If the arm is held straight out and in line with the shoulder, then circumduction is possible. [3]
What the pronation/supination exercise reveals to us is a concept called motor redundancy. [5] Motor redundancy refers to the excess number of motors available in a system to complete a desired motion. If there are multiple ways to complete a motion, then there is no one-to-one correspondence between the position and the motors we use to complete the motion.
In the pronation/supination example, the hand could be pronated by the rotation of the radius and ulna bones, or, it could be placed in the pronated position by circumduction action in the rotator cuff of the shoulder. The result is the same: the hand is positioned palm down. But the motors used to get there, and the order in which they were engaged, is variable. We saw this same sort of situation in our robotic arms in Part 1. [6]
Motor redundancy applied to fencing
If one begins in a guard with a bent arm (see Figure 8), then to bring the sword in line with the shoulder in preparation for a lunge, there are multiple joints available to us. There is abduction/adduction in the shoulder as well as extension and flexion in the elbow (see Figure 5).
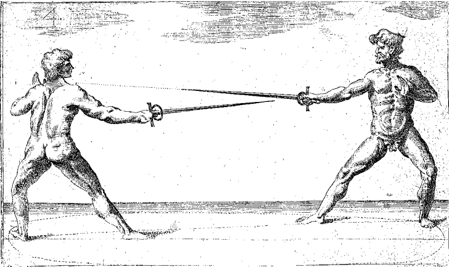
Let’s annotate the fencer on the right with some joints of rotation he might use to prepare himself to lunge by aligning his hand with his lead shoulder.
The right fencer could:
- Lead with extension in the elbow followed by small abduction in the shoulder to bring the hand in line with the shoulder.
- Perform an abduction at the shoulder to bring the hand in line with the shoulder.
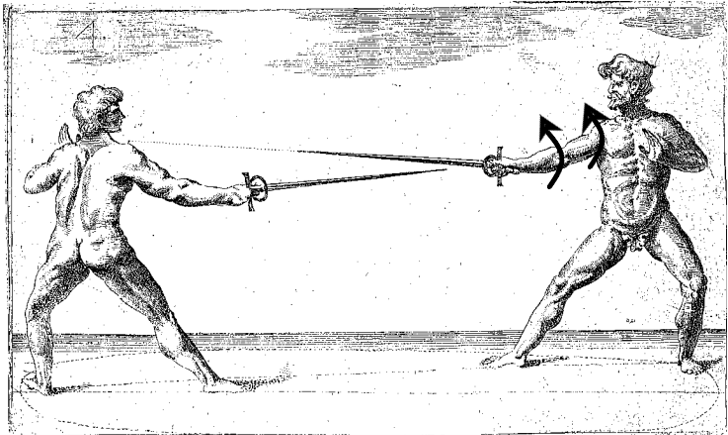
Let’s look at the second case first – raising the arm with pure abduction of the shoulder.
It was just a fling
This motion has brought the right fencer’s sword out of presence (it was previously directed at the opponent’s right shoulder as seen in the dashed line), exposed their openings in the chest, and if they were to lunge at this moment they would have to correct the position of their tip on the way to the target with the wrist. These things are characteristic of flinging – the right fencer sought to move their hand to the desired position with great energy and speed and so has engaged their larger shoulder muscles to raise the arm as quickly as they can. They have done so without engaging their smaller motor muscles in a planned movement. This has in fact placed them in a worse position for completing the second motion, which is to bring the sword to the target via lunging.
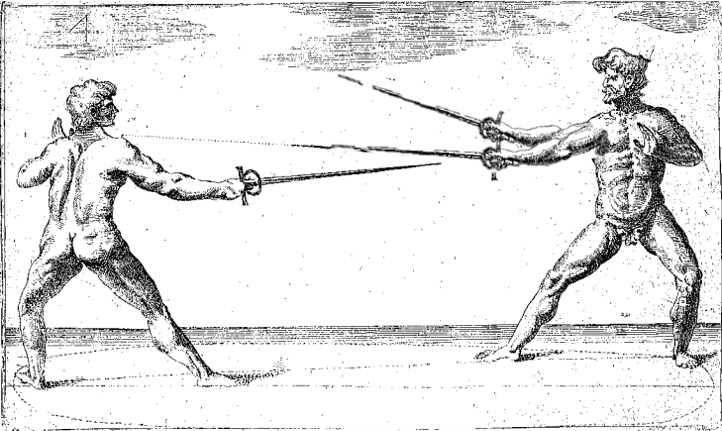
If the right fencer were to bring their hand in line with their shoulder by engaging extension of the elbow first with a smaller abduction in the shoulder, the position is quite different.
This is not a fling – this is a serious relationship
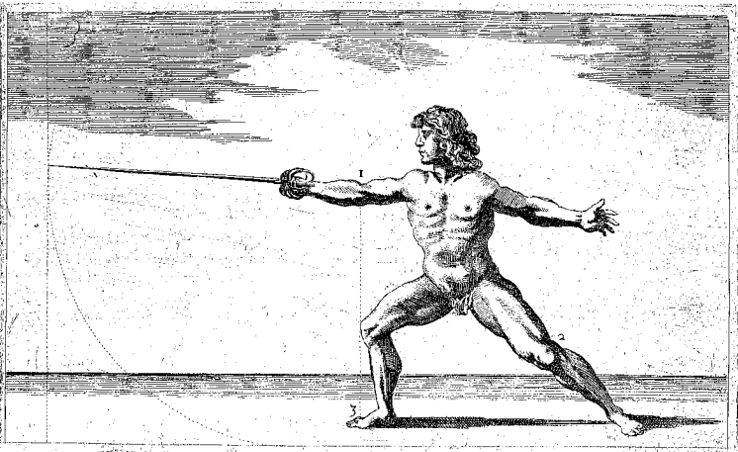
The hand is in a straight line with the shoulder, as also shown in Figure 8, but we can see how the initiation of different joints has changed the direction the hand is pointed, and thereby which direction the sword tip is actually moving when the foot steps forward for the lunge.
Note that the fencer could have yet still begun with an abduction in the arm first, followed by the extension of the elbow but this would be problematic for 2 reasons (remember the arm was initially bent in guard):
- A large motion in the shoulder first is easier for the opponent to perceive as a tell
- Doing this motion with vigor could still cause the abduction motion to overshoot where the hand needs to be as the elbow is extending. This would be characteristic of a jabbing action.
Careful actions are not possible if the hand, body, or feet are flung into motion. Striving to impart greater speed to our movements to complete a motion can cause the body to compensate with actions and muscle groups that are less efficient than other available joint paths.
Flinging is not just endemic in our thrusts and attacks but is also present in other actions. Flinging can cause us to use sub-optimal motions when changing guards. If you change from secunda guard to quarta guard (pronated hand to supinated hand), do you do so with the elbow or with shoulder circumduction? If you make a motion to gain the opponent’s sword, do you do so with the elbow pronation/supination or with wide adduction or abductions of the arm?
Flinging is also enormously problematic in cutting motions. Think of the occasions you may have tried to swing “harder” at the target only to sacrifice your edge alignment, your balance, your posture, or your distance. Yes, your sword technically may have hit the target which is the accomplishment of the basic task your brain commanded (take a thing and hit that other thing). Yet, all those bad actions and problems are examples again of issues in solving motor redundancy. It’s up to us in our training to work on eliminating the extraneous motor actions and engaging the correct ones in the right order without just flinging ourselves into it.
Program your motors to work for you
Training and analyzing these motions is hard [9]. They require us to reprogram our brains to engage joint and muscle groups we may not need to use efficiently to accomplish our everyday tasks. But in fencing, fractions of a second make the difference between victory and defeat.
References
- Anatomy and Physiology, Retrieved OpenStax 2020
- Manipulative Movements of the Forearm, Wrist, and Hand, Retrieved Musculoskeletal Key, 2020
- Structure and Function of the Elbow and Forearm Complex in Essentials of Kinesiology for the Physical Therapist Assistant (Third Edition), Paul Jackson Mansfield DPT, BS, MS, Donald A. Neumann PhD, PT, FAPTA. Retrieved from ScienceDirect 2020
- Elbow Bursitis Exercises, Pronation and Supination Stretch, Retrieved from MyHealth.Alberta.ca 2020
- Redundancy, Motor Control, Retrieved from Wikipedia 2020
- Why n00bs Fling the Sword (Part 1), Retrieved from SwordSTEM 2020
- Joint Actions, Retrieved from Brooks Institute 2020
- La Scherma, Giuseppe Pallavicini, 1670
- Every fencing student ever.